هنگامی که شما دست رباتیک را تصور می کنید، تصویری که به احتمال زیاد به ذهنتان می آید، پنجه های فلزی سختی است که بر روی جسم مورد نظر قرار می گیرد، بدون در نظر گرفتن اینکه آن جسم میله تیتانیوم یا خرس عروسکی باشد.
در حال حاضر، نسل جدیدی از پنجه های مدولار ربات پرینت شده توسط پرینترهای سه بعدی ، به راحتی می توانند تا بیش از ۷۰ بار روزانه وزن و اندازه های مختلف، اعم از حیوانات تا تخم مرغ یا یک برگ کاغذ را بدون آسیب رساندن یا انداختن آنها بلند کنند.
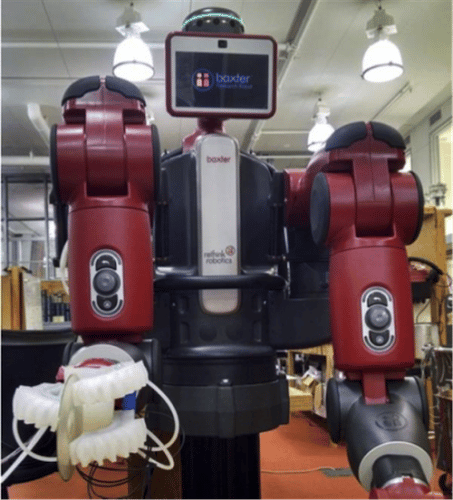
روبات با علوم کامپیوتر MIT و آزمایشگاه هوش مصنوعی (CSAIL) طراحی شده بود و در نهایت نه تنها ربات قادر به بلند کردن اجسام می باشد بلکه در واقع از انواع ابزار طراحی شده برای استفاده انسان ها به کار برده می شود.
دست انعطاف پذیر و بسیار سازگار متشکل از سه انگشت چاپ شده توسط چاپگر سه بعدی است که می توان آنرا به ربات های موجود متصل کرد. هر انگشت با سنسورهای مقاومتی که اطلاعات نقاط را جمع آوری می کنند ، مجهز شده است.
این نقاط توسط یک الگوریتم خوشه بندی پیکربندی شده اند ، به پنجه اجازه می دهد تا اجسام مقابل آن را شناسایی کند و مقداری لازم از نیرو را برای گرفتن و بلند کردن آن را از یک سطح بکار ببرد.
به گفته محققان، دستیابی به این تکنولوژی اولین قدم موفقیت به سوی پنجه های انعطاف پذیر قدرنمند است.
طبق گفته دنیل راس مدیر شرکت CSAIL اگر ما خواستارربات در محیط های انسان محور باشیم، می بایست ربات ها سازگاری بیشتری داشته باشند و قادر به تعامل با اشیائی باشند که شکل و محلشان دقیقا معلوم نیست .
رویای ما ارتقا ربات ها است تا همانند یک انسان، بتوانند یک جسم ناشناخته، بزرگ یا کوچک را مانند شکل تقریبی و اندازه آن تشخیص دهند و چگونه با آن در یک حرکت بدون شباهت رفتار کنند.
ساخت هر انگشت بر مبنای یک فرآیند ریخته گری میباشد ، که با چاپ سه بعدی مجموعه ای از مدل و قالب قطعات است.
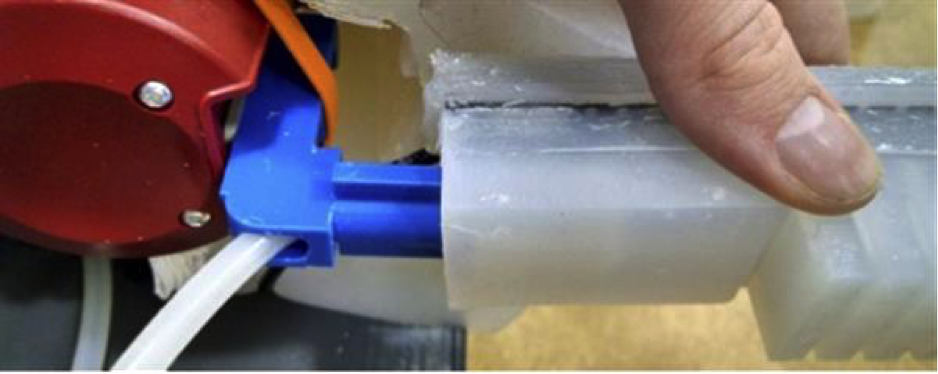
طراحان نیز رابط های مدولاری را به منظور فعال کردن پنجه اولویت بندی کردند تا برای انواع مبانی سخت افزاری موجود، به سادگی با تعویض رابط چاپ شده توسط چاپگرهای سه بعدی قابل استفاده باشد.
اتصال انگشت انعطاف پذیر به رابط ساخته شده توسط پرینتر۳بعدی
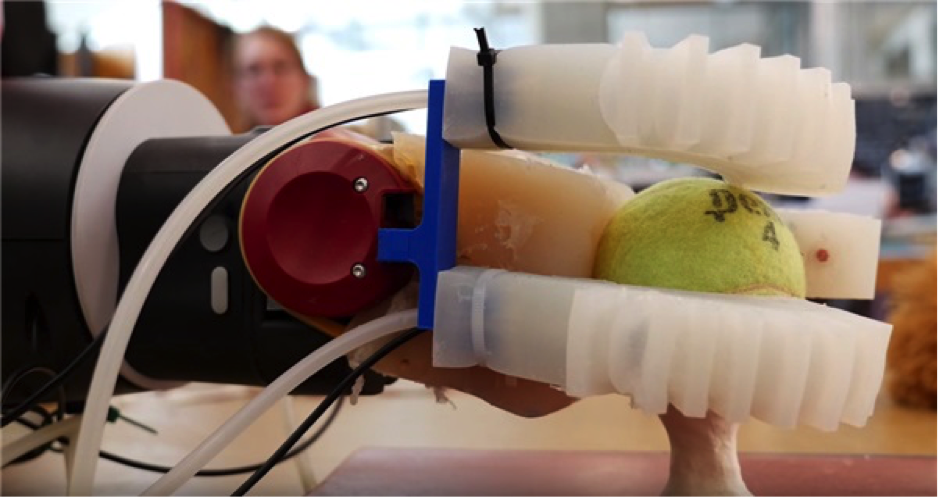
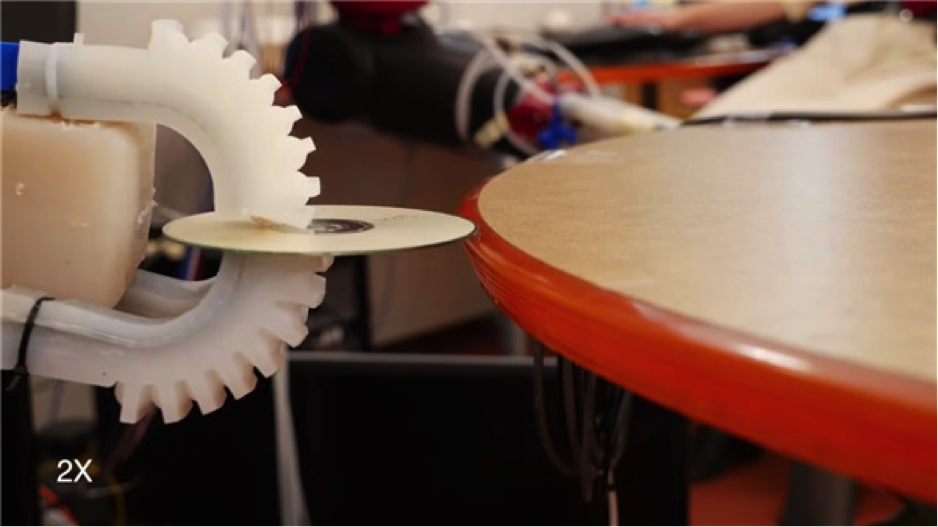
پنجه واقعا میتواند هر چیزی را بردارد . تخم مرغ، توپ تنیس، مکعب روبیک، بطری آب، لیوان های کاغذی، حیوانات و لوازم جانبی مو. حتی می تواند سی دی و تکه کاغذ دروغ صاف بر روی یک میز را بردارد و، اگر جسم ایستاده باشد، می تواند چنین موارد نازک و ظریف مثل یک قلم، عینک را بلند کند.

در هر یک از آزمون ها ، ربات هیچ دانش قبلی از این که کدام مورد باید برداشته شود نداشت،به سادگی برای بستن انگشتان دست خود عمل می کرد ، و به این ترتیب متکی بر الگوریتم خوشه بندی قدرت مناسب و الگوی برداشتن مناسب را انتخاب می کند (پنجه های باز برای اجسام بزرگتر، پنجه های نسبتا بسته برای اجسام سبک)
محققان پنجه منعطف قوی خود را با پنجه پیش فرض سفت و سخت مقایسه کردند. در آزمایش خود، پنجه های پیش فرض قادر به برداشتن CD یا قطعه ای از کاغذ نبود ، و لیوان کاغذی و قوطی نوشابه را شکست.
از سوی دیگر، پنجه انعطاف پذیر هر کاری را بدون مشکل انجام داد. هنوز هم برخی موانع برای حل کردن وجود داردبرای مثال، می تواند به درستی نمی تواند اجسامی که لغزنده و یا سنگین هستند را بگیرد ، مانند کتاب های کوچک. اما با تحقیقات آینده، که ممکن است این مشکلات طولانی مدت نخواهد بود.
طبق گفته های تیم CSAIL ، کار آینده آنها همین اصول اساسی و گسترش آنها جهت ساخت پنجه ای قوی تر و توانمندتر خواهد بود . آنها تصمیم دارند وضوح را با سنسور انعطاف پذیر بهتر به خوبی سنسورهای مختلف انعطاف پذیری داخلی افرایش دهند تا از بخش های مختلف هر انگشت اطلاعات مستقل دریافت کنند.
با استفاده از این فن آوری، ما به زودی قادر به استفاده از روبات ها برای طیف بسیار وسیع تری از امور خواهیم بود از جمله چیدن اقلام نرم، مانند لباس های شسته شده. اجسام ظریف، مانند ظرف های غذا ؛ و یا انجام امور حتی دقیق تر و پیچیده، مانند مانور ابزار پزشکی.
به گفته محققان این دانش برای ایجاد سیستمی که می تواند اجسام را به روش های پیچیده تر استفاده کند مفید خواهد بود، بیش از انجام عملیات برداشتن و قرار دادن ، ربات ها باید قادر به برداشتن انواع مختلف ابزار طراحی شده برای استفاده انسان و کارکردن با آنها باشند .
این تحقیق در یک مقاله با عنوان شناسایی لمسیاجسام با استفاده از یک پنجه منعطف مدولار رباتیک در کنفرانس بین المللی روبات ها و سیستم های هوشمند در آلمان توسط Bianca S. Homberg, Robert K. Katzschmann, Mehmet R. Dogar, and Daniela Rus منتشر شد.




